Усилитель класса D. Усилители класса D компании Texas Instruments Широтно импульсная модуляция в звуке
Hugo Letourneau, Future Electronics
Истинные аудиофилы всегда мечтали сконструировать идеальный усилитель, абсолютно достоверно воспроизводящий каждый звук, записанный на студии. Возможно, они начали мечтать об этом, когда, получив первые уроки электроники, узнали, что топология класса A дает великолепные результаты с точки зрения линейности. Иногда горячие студенты, невзирая на предупреждения своих учителей, пытались изобрести велосипед, посвятив себя созданию усилителя класса A с выходной мощностью 150 Вт на канал, чтобы поразить всех друзей мощным и совершенным звуком. И каждый раз, когда разработка подходила к финальной стадии, выяснялось, что усилитель, по большому счету, представляет собой мощный обогреватель, а его корпус является раскаленным радиатором для транзисторов выходного каскада.
Затем эти студенты начинали увлекаться вопросами снижения энергопотребления, и делали усилители класса B или AB, а наиболее усердные, исследовав все топологии, останавливались на классе D. Для новичков в конструировании усилителей сообщим. В усилителе класса A выходной транзистор усиливает весь сигнал, т.е., 360°. В системах класса B каждый транзистор усиливает только одну полуволну сигнала, или 180°.
Усилители класса AB занимают промежуточное положение с диапазоном, примерно, от 180° до 270°, в зависимости от тока покоя выходного каскада. Усилители класса D часто называют «цифровыми» усилителями, так как выходные транзисторы работают в ключевом режиме, генерируя прямоугольные импульсы, а выходной сигнал на громкоговорители подается через фильтры. Основное преимущество топологии класса D – обусловленный ее цифровым характером высокий КПД, который может превышать 90%. Типовые схемы для каждой топологии выходного каскада показаны на Рисунке 1.
Усилители класса D известны более 25 лет, но настоящую популярность приобрели лишь 10-15 лет назад, или около того. Из за их высокого КПД, они использовались, главным образом, на низких частотах при больших уровнях мощности, т.е., для управления сабвуферами, и очень редко – в средне- и высокочастотных приложениях, вследствие значительных искажений, связанных с несовершенством технологии переключающих схем того времени.
Чтобы сделать усилитель класса D с приличным звучанием, необходимо учесть множество параметров, не пропустив ни одного элемента в цепи прохождения сигнала. Без этого не удастся добиться хороших звуковых характеристик во всем диапазоне частот. На Рисунке 2 изображена простая блок-схема типичного цифрового усилителя. Каждый прямоугольник этой блок-схемы должен быть тщательно выверен и согласован с остальными. Лишь в этом случае можно достичь определенного баланса и создать усилитель, отвечающий требованиям нашего уха.
Каскад ШИМ-модулятора
ШИМ сигнал можно получить с помощью как аналоговой, так и цифровой схемы, точно так же, как аналоговым или цифровым может быть источник звука. Проще всего получить сигнал ШИМ сравнением треугольного напряжения со звуковым сигналом, как это показано на Рисунке 3. Если источник сигнала цифровой, превратить импульсно-кодовую модуляцию в ШИМ можно, используя цифровой сигнальный процессор. В любом случае, первостепенное значение для формирования ШИМ сигнала имеют величина джиттера и стабильность всех генераторов, так как несколько пикосекунд среднеквадратичного значения джиттера навсегда похоронят мечты о создании усилителя c отношением сигнал/шум лучше 100 дБ. В цифровых ШИМ системах добавляется ошибка квантования, порождаемая конечным числом уровней ШИМ.
Методы формирования шумов совершенствовались на протяжении многих лет, в результате чего появились новые технологии, такие, как PDM (pulse-density modulation – плотностно-импульсная модуляция) и дельта-сигма модуляция, которые, теоретически, позволяют сместить спектр шумов дискретизации далеко за область полезных частот, где они могут быть эффективно подавлены фильтрами.
Компаратор должен иметь большую скорость нарастания напряжения и, желательно, двухтактный выходной каскад. Хороший выбор – микросхема , имеющая время задержки распространения сигнала 45 нс и время нарастания/спада 1.2 нс. Немаловажное значение имеет качество трассировки печатной платы, чтобы предотвратить возникновение «звона». Помимо этого, весьма критична топология распределения шин питания и развязывающих конденсаторов. Небрежность в этом вопросе может приводить к увеличению уровня джиттера выходного сигнала. Следует, также, избегать чрезмерной емкостной нагрузки на линию, соединяющую выход модулятора с драйвером MOSFET транзисторов.
Несимметричный или дифференциальный?
Прежде чем выбирать, каким будет выходной каскад, – несимметричным или дифференциальным, – очень важно понять влияние этого выбора на характеристики конструкции. Несимметричный режим выгоднее с точки зрения количества и цены компонентов, но для предотвращения постоянного смещения выхода потребуется развязывающий конденсатор. Кроме того, все колебания напряжения питания неизбежно передаются прямо на выход, еще более увеличивая уровень искажений. Поэтому использовать несимметричную схему без обратной связи невозможно.
Дифференциальный режим затратнее, но дает много преимуществ, таких как меньший уровень четных гармоник, улучшенная устойчивость к колебаниям питающего напряжения, меньшая мощность, рассеиваемая каждым транзистором, и более простое решение задачи устранения постоянного смещения, не требующее развязывающих конденсаторов. Обратная связь может улучшить выходной сигнал, однако дифференциальная топология без обратной связи искажает сигнал намного меньше, чем несимметричная.
Выходной MOSFET каскад и драйвер
В схеме, изображенной на Рисунке 2, важны все элементы, но два из них оказывают наибольшее влияние на искажения выходного сигнала. Это MOSFET транзисторы и их драйвер. Качество звука очень зависит от формы импульсной последовательности, и любое отклонение ШИМ сигнала от идеального ухудшает его качество.
Для этого каскада важны, и должны быть рассмотрены, многие характеристики MOSFET транзисторов:
- ток управления и входная емкость;
- мертвое время (что важно для исключения сквозных токов);
- сопротивление открытого канала;
- время включения/выключения.
Любой из этих параметров влияет не только на качество звука, но и на рассеиваемую транзисторами мощность. «Мертвое время» – это задержка между выключением одного транзистора и включением другого, время, в течение которого оба транзистора выключены (или находятся в процессе выключения). При отсутствии мертвого времени, скорее всего, будет возникать ситуация, когда один транзистор выходного каскада уже открыт, а другой еще не закрыт, вследствие чего ток от положительной шины питания будет протекать к отрицательной шине напрямую через два открытых транзистора. Этот ток называется сквозным и должен быть минимизирован подбором соответствующего мертвого времени. Сквозной ток является основной причиной нелинейных искажений в системах класса D. Недостаточное мертвое время может ухудшить коэффициент нелинейных искажений на проценты. Выбор MOSFET транзисторов и симметрия плеч выходного каскада – важнейший момент в проектировании высококачественного усилителя.
Ток управления затвором MOSFET транзистора должен соответствовать его емкости, чтобы иметь малые времена нарастания и спада импульсов на входе транзистора, которые, в свою очередь, обеспечат крутые фронты в выходном сигнале. В свою очередь, источник питания должен быть способен отдавать большие импульсные токи.
Мощность рассеивания и правильный выбор MOSFET транзистора
Транзисторы в переключающих каскадах класса D преобладающую часть времени полностью открыты или полностью закрыты, и рассеиваемая ими мощность минимальна. Как видно из Рисунка 1, в системах класса D используются двухтактные, каскады, в полу- или полномостовой конфигурации, выходными сигналами которых являются прямоугольные импульсы. При этом поочередно, равное время, открыт то один MOSFET транзистор, подключенный к положительной шине питания, то другой, подключенный к отрицательной шине. Теоретически, это могут быть два разных транзистора, с каналами N и P типа, но практически предпочтительнее использовать сдвоенные N-канальные транзисторы, обеспечивающие повышенную симметрию и лучшее мертвое время. Включенный MOSFET транзистор рассеивает очень небольшую мощность, являющуюся функцией прямого падения напряжения, зависящего, в свою очередь, от сопротивления открытого канала R DS(ON) . Это имеет огромное значение, не только с точки зрения экономии энергии, но, прежде всего, с точки зрения габаритов схемы. К примеру, выходной каскад 100-ваттного усилителя класса A рассеивает в виде тепла мощность 300 Вт и требует очень больших транзисторов и теплоотводов, усилитель класса AB вполне можно сделать, используя транзисторы в корпусах TO3 и радиаторы традиционных размеров, а для усилителя класса D будет достаточно транзисторов в корпусах SOT223 или TO89. А это означает, что хороший усилитель мощности может иметь относительно небольшие размеры, которые, по мере развития технологии, будут постоянно уменьшаться, благодаря росту эффективности и снижению габаритов используемых приборов.
Одна из распространенных ошибок заключается в том, что, стремясь к наивысшей эффективности, разработчики выбирают MOSFET транзисторы с наименьшим значением R DS(ON) и ожидают, что транзисторы будут совершенно холодными. В реальности все может быть совершенно по-другому.
P D = P RESISTIVE + P SWITCHING = R DS(ON) × I LOAD 2 + (C RSS × V 2 × F SW × I LOAD) / I GATE
I LOAD – ток нагрузки
C RSS – емкость затвора
V – размах напряжения на нагрузке
F SW – частота переключения
I GATE – ток затвора
К примеру, давайте представим, что для выходного каскада мощностью 100 Вт мы выбрали замечательный транзистор фирмы , имеющий R DS(ON) = 3.9 мОм и C RSS = 455 пФ, который управляется MOSFET драйвером с выходным током 1 А. Каскад нагружен сопротивлением 8 Ом, размах напряжения на нагрузке 50 В при частоте сигнала 100 кГц. Рассеиваемая транзисторами мощность не превысит:
P D = 0.0039×5 А + (455×10 -12 ×50 2 ×100×10 3 ×5 А) / 1 А = 0.0195 + 0.568 = 0.588 Вт
| Для комментирования материалов с сайта и получения полного доступа к нашему форуму Вам необходимо |
Рассказать в:
Времена нынче такие, что впору открывать
подзабытую рубрику «Сделай сам» эпохи соцдефицита. Девальвация рубля
привела к удорожанию импортной электроники, покупать новый усилитель
мощности стало накладно. Да еще классические Hi-Fi-устройства,
работающие в классах А и А-В, обладают прискорбно малым КПД – это при
недешевой электроэнергии. Поэтому «цифровое» усиление в классе D – это
в чем-то антикризисное решение. При управлении громкостью в микшере
аудиокарты собрать цифровой усилитель можно, даже если паяльник держишь
в руках первый раз. Главное – раздобыть «правильную» микросхему…
Фирма
NXP, не так давно выпустившая на рынок рекордно мощную TDA8950E класса
D, была основана многоуважаемой Philips с ориентацией на производство
полупроводников. Так что сомневаться не приходится – очередной продукт
будет неординарным.Амплитудно-частотная характеристика «акустических»
выходов микросхемы, как и следовало ожидать, зависит от сопротивления
нагрузки. Проседать на высоких частотах микросхема начинает с нагрузкой
8 Ом. Тогда как 4 и 6 Ом данной микросхеме просто в радость. Завал на
низких частотах несущественный, причем величина нагрузки не
сказывается. Подключение по мостовой схеме в монорежиме равномерно
поднимает АЧХ аккурат на 6 дБ. По мере подъема уровня мощности
гармонические искажения на разных частотах ведут себя по-разному. На
средних частотах искажения типично повышены почти во всем диапазоне
мощностей. На 10 Вт для 1 кГц искажения в 0,1% все-таки маленькими не
назовешь. Минимальные искажения на 100 Гц при 10 Вт: 0,007%. С
нагрузкой 4 Ом глобальный скачок искажений происходит на рубеже 100 Вт.
Проникновение каналов невелико, минимальное – на частоте 100 Гц (-68
дБ). Показательна АЧХ, снятая в режиме «заглушки» (Mute): зависимость
от нагрузки неактуальна, а вот экспоненциальный рост уровня фона в
ультразвуковой области частот настораживает.

В рознице найти микросхемы серии TDA не составляет
труда. Продаются и готовые платы, к которым остается лишь докупить блок
питания. К нам на тест поступила новейшая микросхема TDA8950E,
размещенная на миниатюрной «демонстрационной» плате с соответствующей
обвязкой. На микросхему нацеплен (поджат накидной скобой) небольшой
металлический радиатор с развитым оре брением для естественного
теплоотвода. Чтобы протестировать сие устройство, ничего не оставалось,
как быстренько сделать усилитель своими руками.

Чем меньше напряжение подводимого питания
микросхемы, тем меньше выдаваемая на выходе мощность. Электрически 150
Вт на канал достигается при ±37 В полярного питания. В этом случае
трансформатор понадобится крепенький, чтобы ток 2 А держал, не
прогибаясь. В идеале – тороидальный, причем с двумя выходными
обмотками, чтобы получить полярное питание без заморочек. Диодный мост
лучше взять готовый, у которого все в одном корпусе, торчат только
четыре ножки – к двум внутренним подводим переменное напряжение, с двух
внешних снимаем постоянное. Затем берем пару полярных конденсаторов
емкостью от 2000 мкФ на напряжение 50–60 В (с запасом) (10 000 мкФ –
то, что доктор прописал) и, строго соблюдая полярность (иначе
«кондерам» хана), включаем параллельно с общей точкой, образованной
средней жилой выходных обмоток трансформатора. Один «кондер» емкостью
10 000 мкФ обойдется рублей в 150. Никто не запрещает набрать желаемую
суммарную емкость, запараллелив недорогие по 2000 мкФ.

Чтобы сгладить высокочастотные импульсы, в том
числе проникающие из розетки, впаиваем (также параллельно) по
керамическому конденсатору емкостью около 0,1 мкФ (полярность не
важна). Для обеспечения безопасности обязателен тумблер, отключающий
как «фазу», так и «землю». Предохранитель желателен (на ток 1–2 А,
соответственно потреблению). Еще не помешает сразу за предохранителем
(который впаивается последовательно, т.е. в разрыв одной из жил)
воткнуть параллельно вилке один конденсатор эдак на 630 В емкостью
0,047 мкФ. Поясним: конденсатор, впаянный параллельно нагрузке,
представляет собой фильтр первого порядка, подавляющий все составляющие
выше определенной частоты, обусловленной емкостью этого конденсатора.
Чем больше емкость, тем ниже частота «отсечки». Отрицательный провод
полярного питания подводим к клемме платы усилителя, помеченной как
Vss, а положительный – к клемме Vdd. Провод, отходящий от общей точки,
забрасываем на клемму «земли» (Gnd). Все! Усилитель готов.

Перед подачей 220 В разумно пройтись по пайке,
«прозвонив» тестером на предмет слу- чайного короткого замыкания.
Первый раз 220 В подать на несколько секунд, в идеале подключив не
колонки, а мощные резисторы не менее 4,7 Ом на 10–15 Вт. Хилые (до ~5
Вт) быстро или вообще сразу сдохнут. Поначалу стоит подавать слабый
сигнал, убрав уровень громкости в аудиокарте чуть ли не до нуля. Если
ни один из элементов не будет слишком быстро греться, трансформатор не
будет зловеще гудеть и т.п., усилитель можно эксплуатировать. Саму
микросхему спалить практически невозможно благодаря электрической
защите от короткого замыкания, термической защите от перегрева, защите
от заряда статического электричества и прочим блокировкам «от дурака».
Пассивные акустические системы подключаются с соблюдением фазы: одна
колонка на Out1 с клеммами «+» и «–», другая на Out2 с соблюдением тех
же «+» и «–». Если перепутать местами на одной из колонок «+» и «–»
(полярность), то ничего не сгорит, но честных стереоэффектов не
получить.

Провести измерения параметров усилителя класса D
посредством популярной программы RMAA и доступной звуковой карты, не
имея качественного (более 40 дБ) аналогового фильтра, отсекающего весь
ультразвуковой мусор, – пустая затея. Пресловутая несущая частота ШИМ
(для TDA8950E это 345 кГц) – это только верхушка айсберга. Конечно,
подавление данной частоты, пролезающей на выходы микросхемы, требует
мощных фильтров. Не испортить при этом полезный сигнал не так просто,
как кажется. Задача усугубляется активностью импульсов, коротких во
времени, но неслабых по амплитуде. Посему в данном случае париться с
измерениями в домашних условиях явно не стоит.

Экспертное прослушивание происходило в сравнении с
интегральным Hi-Fi-стереоуси-лителем Harman-Kardon HK970 мощностью 120
Вт на 4 Ом (0,3% THD), имеющим классическую схему на неслабых полевых
транзисторах и потребляющим под 410 Вт. В качестве пассивных
акустических систем выступала Hi-Fi-стереопара (тщательно подобранная
изготовителем по технологическому разбросу параметров) DALI Suite,
сделанная в Дании. Это удачная связка, что могут подтвердить многие
аудиофилы. Акустика функционирует подобно беспристрастному студийному
монитору, не прощая малейших огрехов записи. Искажения какого-либо
блока усиления, если таковые будут критичными, также легко заметны на
слух.

Мощность, выдаваемая примененной
TDA8950E, откровенно удивила. В помещении площадью12 кв. м задрожали
стекла уже на «малых оборотах». Выкручивать уровень громкости в микшере
аудиокарты не понадобилось. Левый и правый каналы получились, правда,
не совсем идентичными, воссоздаваемая стереокартина может
размазываться. Однако при воспроизведении сжатых форматов вроде МР3 это
некритично. По сравнению с истинно Hi-Fi-ным усилителем в связке с
чувствительной акустикой привносимые нашим «цифровиком» искажения не
пройдут не замеченными для опытного аудиофила.
Итак, «цифровой»
стереоусилитель, сделанный на основе TDA8950E, получился мощным и
экономичным. Если не злоупотреблять экстремальной громкостью, то
качество звука обеспечивается в целом приемлемое (по меркам
мультимедийной акустики). Особое внимание следует обратить на выходные
фильтры – на «китовой» плате они реализованы не лучшим образом.
Наиболее оптимальный вариант применения микросхемы TDA8950E – монорежим
с подключением по мостовой схеме, то есть в активных сабвуферах.
Похвально, что усилитель не пасует перед низкоомной нагрузкой и не
зажимает низкие частоты на малой громкости.
Принцип работы усилителей класса D
Технология широтно-импульсного
(ШИМ) усиления звука, породившая так называемый класс D, стала
внедряться более десяти лет назад, хотя сама идея зародилась раньше. В
последнее время усилители класса D проникли не только в портативные
цифровые аудиоустройства. В телевизорах, музыкальных центрах,
коробочных домашних театрах, автомобильных аудиоустройствах и во многих
мультимедийных акустических системах обосновались довольно миниатюрные
микросхемы, выделяющие на удивление мало тепла. Эффективность
современных схем быстро растет с мощностью, достигая 90% уже на
половине от ее максимума. При этом эффективность транзисторных
усилителей еще недавно самого распространенного класса A-B не
дотягивает до 40%. На полной мощности сравнивать бессмысленно,
поскольку любой усилитель уже на подходе к заветному максимуму
срывается в клиппирование, плодя высокочастотные гармоники. Класс А в
состоянии похвастаться только 25% эффективности, а чистый класс В – 78%
(теоретически, при мощности условно близкой к максимальной).

Топология класса А,
обеспечивающая наиболее качественный звук, подразумевает использование
каждого транзистора как источника постоянного тока, способного снабдить
динамик необходимым током как при положительной полуволне, так и при
отрицательной (звуковой сигнал от природы полярен). Такому усилителю,
грубо говоря, приходится высаживать половину мощности на поддержание
постоянной составляющей тока «нейтрального уровня», то есть даже тогда,
когда входной сигнал отсутствует. В топологии класса В поддержание
постоянной составляющей тока игнорируется за счет того, что транзисторы
заставляют работать на манер тянитолкая для положительной и
отрицательной полуволн соответственно. Расплата неминуема: минимизация
искажений выливается в серьезную техническую задачу. Гибридная
топология класса А-В допускает постоянную составляющую тока на выходе
транзисторов, но гораздо меньшей величины, чем в классе А, дабы не
дергать транзисторы хотя бы на малой мощности (в отличие от
ласса
В). То есть усилители класса А-В на малой мощности работают в классе А,
а на средней и максимальной – в классе В. Естественно, на малой
мощности эффективность усиления в классе А-В получается низкой, зато с
искажениями нет проблем.
Фишка же топологии класса D в
том, что благодаря предварительному широтно-им-пульсному преобразованию
звукового сигнала транзисторы функционируют в импульсном режиме на
высокой частоте, находясь все время в открытом состоянии. Образно
говоря, не успевают «завязнуть» на постоянном токе, а необходимость в
каком-либо управлении отпадает – тактирование автоматически задается
частотой модуляции.
Усилители класса D часто
называют цифровыми. Дело в том, что ядру микросхемы в общем-то «по
барабану» с каким сигналом работать: с аналоговым ШИМ (внешне сильно
напоминает DSD-кодирование для SACD) или с сугубо цифровым однобитным
(с передискретизацией). По сути, и там и там – кодовая модуляция, а
кодированный сигнал имеет постоянные во времени пиковые амплитуды (либо
нолик, либо единичка). Усиливать такой сигнал проще пареной репы.
Правда, результат подобного усиления придется подвергать специфической
«зачистке», но это уже отдельная история.
Раздел:
[Усилители мощности низкой частоты (ламповые)]
Сохрани статью в:
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
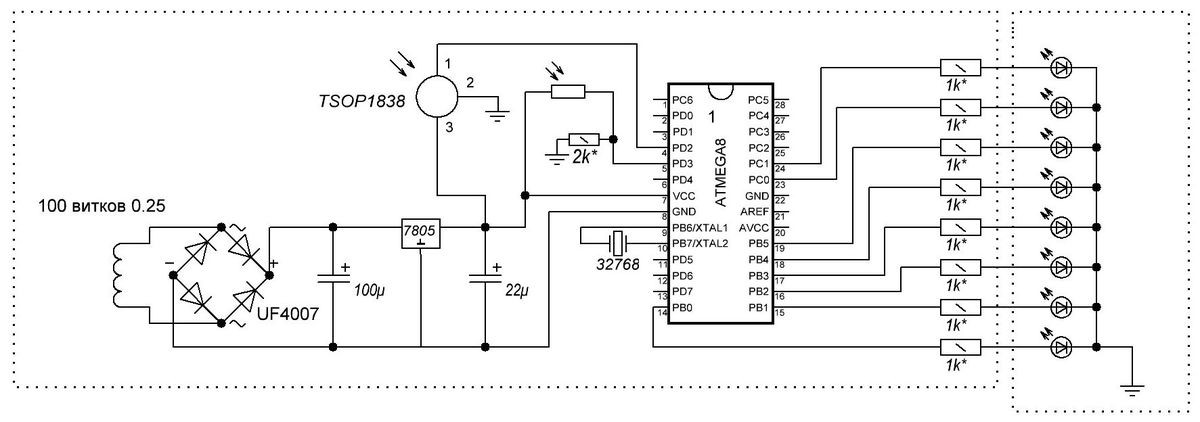
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t
к периоду импульса T
. D = t/T
. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения. S = T/t
.
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F
= 1/0,001 – 1000 (Гц).
Смысл ШИМ заключается в регулировании среднего значения напряжения путем изменения коэффициента заполнения. Среднее значение напряжения равно произведению коэффициента заполнения и амплитуды напряжения. Так, при коэффициенте заполнения 0,3 и амплитуде напряжения 12 В среднее значение напряжения составит 0,3 х 12 = 3,6 (В). При изменении коэффициента заполнения в теоретически возможных пределах от 0% до 100% напряжение будет изменяться от 0 до 12 В, т.е. Широтно-импульсная модуляция позволяет регулировать напряжение в пределах от 0 до амплитуды сигнала. Что и используется для регулирования скорости вращения электродвигателя постоянного тока или яркости свечения светильника.
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Сигнал с выхода ШИМ можно также усреднять посредством простейшего фильтра низких частот. Иногда можно обойтись и без этого, поскольку обладает определенной электрической индуктивностью и механической инерцией. Сглаживание сигналов ШИМ происходит естественным путем в том случае, когда частота ШИМ превосходит время реакции регулируемого устройства.
Реализовать ШИМ можно посредством с двумя входами, на один из которых подается периодический пилообразный или треугольный сигнал от вспомогательного генератора, а на другой модулирующий сигнал управления. Длительность положительной части импульса ШИМ определяется временем, в течение которого уровень управляющего сигнала, подаваемого на один вход компаратора, превышает уровень сигнала вспомогательного генератора, подаваемого на другой вход компаратора.
При напряжении вспомогательного генератора выше напряжения управляющего сигнала на выходе компаратора будет отрицательная часть импульса.
Коэффициент заполнения периодических прямоугольных сигналов на выходе компаратора, а тем самым и среднее напряжение регулятора, зависит от уровня модулирующего сигнала, а частота определяется частотой сигнала вспомогательного генератора.
Цифровая широтно-импульсная модуляция
Существует разновидность ШИМ, называемая цифровой ШИМ. В этом случае период сигнала заполняется прямоугольными подымпульсами, и регулируется уже количество подымпульсов в периоде, что и определяет среднюю величину сигнала за период.
![]()
В цифровой ШИМ заполняющие период подымпульсы (или «единички») могут стоять в любом месте периода. Среднее значение напряжения за период определяется только их количеством, при этом подымпульсы могут следовать один за другим и сливаться. Отдельно стоящие подымпульсы приводят к ужесточению режима работы ключа.
В качестве источника сигнала цифровой ШИМ можно использовать COM-порт компьютера с 10-битовым сигналом на выходе. С учетом 8 информационных битов и 2 битов старт/стоп, в сигнале COM-порта присутствует от 1 до 9 «единичек», что позволяет регулировать напряжение в пределах 10-90% напряжения питания с шагом в 10%.
Широтно-импульсная модуляция (ШИМ) – это метод преобразования сигнала, при котором изменяется длительность импульса (скважность), а частота остаётся константой. В английской терминологии обозначается как PWM (pulse-width modulation). В данной статье подробно разберемся, что такое ШИМ, где она применяется и как работает.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана .
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в . Он построен на базе микросхемы и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
Читайте так же